
This is a comparison of Solo, built by Tim Weaver, and Goliath built by Daryl Sandberg. We will compare strategies, materials and components and comment on their advantages or disadvantages in this article. Our hope is that this information will stir interest in building new types and styles of mini sumo robots.

Motors and Batteries
This is the heart of any competitive sumo robot. The choices you make here will determine if your robot is a winner or not. Solo uses Hitec HS 645MG servos modified for continuous rotation. The specs are:- .24 seconds/60 degrees @ 4.8 volts (Solo uses 9 volts, more on that later) 41.67 RPM
- 107 ounce/inches of torque @ 4.8 volts
- $39.99 at Tower Hobbies
Goliath uses Hitec HS 945MG servos modified for continuous rotation. The specs are:
- .16 seconds/60 degrees @ 4.8 volts (62.5 RPM)
- 120 ounce/inches of torque at 4.8 volts
- $73.99 at Tower Hobbies
Tactical Advantages and Disadvantages
Solo has the advantage in quick battles. Goliath has the advantage in long fights. Solo uses 9 volt batteries that drive the HS 645 servos faster than Goliath's HS945 servos at 4.8 volts. In a short contest, Solo has the advantage. But Solo's batteries, because of their lower capacity, start to fade as the contest drags on. If Solo doesn't win right out of the shoot, it's likely that Goliath will probably take the match.
A robot with 645MG servos and 9 volts of AA or AAA batteries would be a tough combination to beat. The 945MG servos at 9 volts would have more torque, but it's unlikely you can get more traction than either Goliath or Solo and still be legal in the mini sumo Rules, so why waste the money. Get the cheaper servos and have some 8 cell battery packs made.
Weight Distribution


Which is more important? Putting most of the weight on the tires or on the scoop? Shifting the weight to the tires gives the robot more traction but more weight on the front give the robot a better chance of getting under the competitor's robot.
Goliath has a weight distribution of 76/24. Seventy-six percent of Goliath's weight is on the tires, with 24% on the scoop. Solo has a weight distribution of 80/20 with 80% of Solo's weight on the rear tires and 20% on the scoop. Even though Goliath has 23 grams more weight on the front scoop, Solo can get under Goliath's scoop almost every time because of the angle of the scoop (more on that later).
Both Goliath and Solo are power pushers. They rely on power and traction to beat their opponent. A weight distribution of 75-80% on the driving tires is probably the best range. Any more and there would not enough weight to keep the front of the robot (and the scoop) down. Any less and you lose traction.
Bodies and Scoops
 |  |
 |  |
 |
Goliath and Solo are very similar in body and scoop design. Both have carbon fiber bodies and both have spring steel scoops. The scoops were cut from the same piece of 0.010 spring steel.
Carbon fiber was chosen for Goliath's body primarily because it looked cool. It also is very strong for the weight. The body was first formed out of 1/32 inch aircraft plywood that was purchased at a hobby store. It was cut with an X-acto knife and a pair of scissors and formed over a piece of wood. Then a layer of carbon fiber was epoxied to the plywood base. It makes a very durable body that takes a beating but still weighs 15 grams less than a 0.030 inch thick aluminum body.
Solo's body and chassis were also formed with carbon fiber. First a sheet of Mylar was laid down on a flat surface. Then a layer of carbon fiber was added and saturated with epoxy. A layer of spacer material was also added, then another layer of carbon fiber. More epoxy was applied and another piece of Mylar was put on top and squeegeed to smooth out any bubbles. After curing overnight the Mylar was removed, leaving a perfect finish on both sides of the carbon fiber sandwich. The chassis was cut out of this piece with a bandsaw. The body was made similarly except that a wooden mold was used to make a curve in the body. The body is attached to the chassis at a 45 degree angle.
Solo and Goliath use a strip of one inch wide by 0.010 inch spring steel for the very front of the scoop. The sumo rules state that a robot can't have an object that is sharper than 0.005 inch radius. The 0.010" spring steel is the thinnest that you can use without violating the rules.
Since Goliath's scoop is mounted to the front of the body, the angle is 30 degrees from horizontal. Solo's scoop is mounted to the chassis. This puts it at 15 degrees from horizontal. This is clearly a tactical advantage for Solo. Even though Goliath has more weight on the front of the robot, Solo will get under Goliath nearly every time if the robots go nose to nose.
Sensors


Solo uses two Hamamatsu photo reflective line sensors. These were selected because they are extremely small and light weight. Solo would have been overweight with the Fairchild QRB1134 sensors used on the Mark III. Five Sharp GP2D15 sensors are used to detect the opponent. Two face forward, one faces outward on each side and one is facing rearward.
Goliath uses Fairchild photo reflective sensors for line detection. They were selected because they were readily available and cheap. Two GP2D15 sensors face forward and two face outward, one from each side.
The line sensors on Solo are very close to the front of the robot. They fit better under the body because of their small size. The larger Fairchild sensors on Goliath are 50 mm from the front edge. More of the robot is hanging over the edge of the ring when Goliath sees the white edge. This leaves less time for Goliath to react to the white line and turn around. As a result, Goliath cannot go at full speed. The next modification to Goliath will probably be Hamamatsu sensors mounted closer to the front of the robot.
Controllers

- See the enemy, attack the enemy
- Stay in the ring
Tires and Wheels


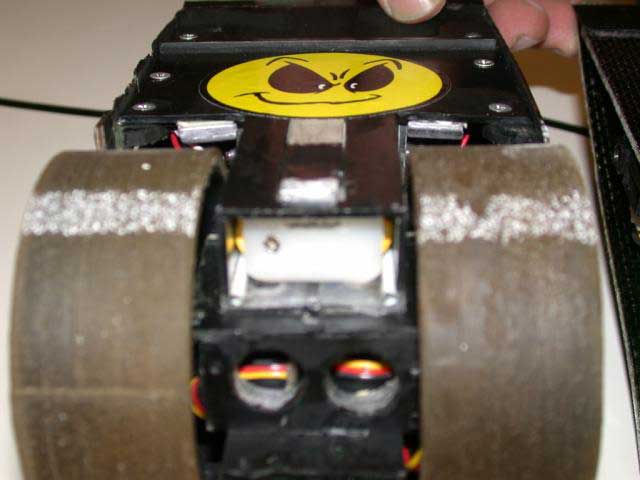
Goliath and Solo both use a wheel that is large enough for the servo to fit inside it. This allows wider wheels and tires to fit within the 100 mm size limit. The Mark III, for example, can only accept tires about 10 mm wide. Solo's wheels are made from Onfa 1/8 scale RC Car Star Rims. Goliath's wheels are made from Mark III wheels modified with material from ABS pipe fittings. Solo's tires are 33 mm wide, Goliath's are 30 mm wide. The diameter of Solo's tires is 86 mm, Goliath's are 75 mm. Solo should have a significantly larger contact patch than Goliath, but if you look closely at the pictures, you can see that Solo's servos were slightly out of square when the pictures were taken. The result is camber in the wheels which has reduced the contact patch. Tim has plans to remount the servos with a more robust method that will solve this problem. Just a note: If you mount your servos with double sticky tape and let your robot sit with the weight on the wheels, eventually your servos will start to sag and the wheels will tilt inward at the top.
Tires for both robots were built using the methods in "Making Sticky Tires".
This is a three part urethane compound that is tough to beat for traction.
Simply put, the more contact, the more traction. With more contact area, Solo has the tactical advantage when the tires are squared up.
Strategies
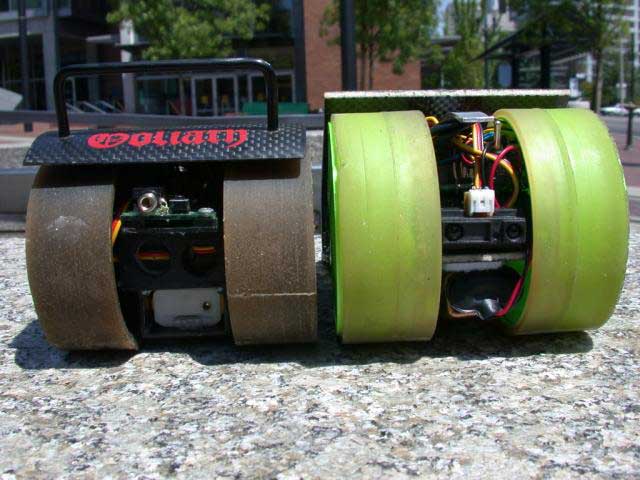
Solo and Goliath are both drop down robots. This strategy takes advantage of the mini sumo rules that state that the robot must fit within a 10cm by 10cm square at the beginning of the contest. After five seconds, the robots back up and drop down, making the footprint 10 cm by 19.5 cm. This allows space for all the stuff you need in a sumo robot while making room for the big tires. It also allows for a sloping front on the robot that is more likely to get under the opposing robot.
Both robots are currently straight attack robots. See it, attack it, stay in the ring. Nothing fancy, just the basics. Solo has an additional sensor on the rear allowing one additional strategy. See it, avoid it.
Look for interesting changes in the attack strategies for both robots in the next contest.
Conclusion
Both Solo and Goliath are well designed robots. Each has taken a slightly different approach to the challenge of winning in mini sumo. They are close enough to each other that luck and the robot that has the starting advantage are more likely to determine the winner of the match than any other single factor.
Hopefully this comparison of Goliath and Solo will provide you with ideas for building a new robot or improving the performance of your current robot. A detailed chart comparing all of the components is shown below.
If you have any questions or comments, post them on: http://groups.yahoo.com/group/PARTS/
Solo vs. Goliath Comparison Chart
Solo vs. Goliath Comparison
| Solo | Goliath | |
| Servos | Hitec HS645MG $39.99
.24 sec/60 deg 41.7 rpm ( 4.8 V) 107 inch ounces (4.8 V) Driven at 9 Volts |
Hitec HS945 MG $73.99
.16 sec/60 deg 62.5 rpm (4.8 V) 120 inch ounce (4.8 V) Driven at 4.8 Volts |
| Batteries | Two 9 volt alkaline 145 MA | 4 AA Ni-Cad 700 MA |
| Weigh Distribution | 80 % rear, 20 % front | 76 % rear, 24 % front |
| Body | Carbon fiber @ 45 degrees from Hor. | Carbon fiber @ 30 degrees from Hor. |
| Scoop | Spring steel 0.010" thick, 15 degrees from horizontal | Spring steel 0.010" thick, 30 degrees from horizontal |
| Line sensors | Two Hamamatsu Photo Reflectors | Two Fairchild Photo Reflectors |
| Opponent Sensors | Five Sharp GP2D15 sensors
Two facing forward One each facing left and right One rearward |
Four Sharp GP2D15 sensors
Two facing forward One each facing left and right |
| Controller | Motorola HC11 programmed under Linux | Parallax Basic Stamp 1 programmed under Windows 95 |
| Tires | Hand cast urethane three part compound. 33 MM wide, 86 MM tall | Hand cast urethane three part compound. 30 MM wide, 75 MM tall. |
| Strategy | Drop down, find the opponent, stay in the ring. | Drop down, find the opponent, stay in the ring. |
| Wheels | Modified 1/8 scale RC Car Star rims. | Modified Mark III wheels with ABS
plumbing fittings. |